В курсе преподаются программирование, электроника и схемотехника.
Учебная программа для BotBase (старшая группа)
Программирование:
Урок 1: Этапы написания программы. Базовые понятия. Типы данных. Условный оператор if.
Урок 2: Условный оператор switch (). Операции языка программирования С++. Операторы ввода-вывода.
Урок 4: Одномерные массивы. Структуры.
Урок 5: Двумерные массивы. Функции.
Урок 6: IDE Arduino. Скетч и его структура.
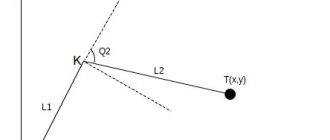
Урок 7: Кинематические цепи. Прямая и обратная задачи кинематики.
Урок 8: Решение обратной задачи кинематики для ноги собаки.
Урок 9-10: Позиционирование ноги собаки в точку с заданными координатами.
Урок 11: Связь между ПК и Arduino через последовательный порт со стороны платы.
Урок 12: Работа со строками.
Урок 13: Работа с COM-портом. Передача пакета данных на плату.
Урок 14: Реализация шага для одной ноги собаки.
Урок 15: Обеспечение выполнения шага во всех направлениях.
Урок 16: Транспонирование алгоритма движения на все 4 ноги собаки.
Урок 17: Обеспечение асинхронности движения двух групп ног для передвижения.
Электроника, схемотехника и механика.
Урок 1: Введение. Ознакомление с микроконтроллерной техникой.
Урок 2: Датчики и их типы. Простейшие схемы подключения. Типы датчиков· Как работать с датчиками?
Урок 3: Двигатели. Типы двигателей. Как работать с двигателями? Двигатели в робототехнике.
Урок 4: Телеметрия. Информация и управление. Сеть. Дистанционное управление.
Урок 5: Делаем платы своими руками. Печатная плата. Способы изготовления. «Лазерноутюжный способ». Разработка схемы и ее изготовление.
Урок 6: Роботика. Основы управления роботикой.
Урок 7: Навигация. Инерционная. Сенсорная. Спутниковая. Видео (Обзор существующих систем)
Учебный план для RoboKid (младшая группа)
Урок 1.
Теория: Знакомство со средой S4A. Основные функции.
Практика:Создание программы для светильника.
Урок 2.
Теория: Cерводвигатель. Мотор. Терморезистор. Написание программы для Arduino на S4A.
Практика: Пентограф. Проект, в котором серводвигатель управляется с помощью потенциометра.
Урок 3.
Теория: Элементы электронных схем, условно-графические изображения. Блок «если» в S4A.
Практика: Проект «Мини-пианино» — управление частотой звучания пьезопищалки с помощью двух кнопок.
Урок 4.
Теория: Светодиодные сборки. Транзисторы биполярный и полевой. Сдвиговый регистр. Блок «Повторить» в S4A.
Практика: Создание проекта — прототипа игры «Кроты»
Урок 5.
Теория: Микроконтроллер и элементы обвязки. ШИМ.
Практика: Проверка полученных знаний по программированию в среде S4A.
Урок 6.
Теория: Транзисторы: назначение, устройство, использование.
Практика: Расширение двухкнопочной игры «Кроты» на пять кнопок и светодиодов.
Урок 7.
Теория: Виды датчиков.
Практика: Завершение создания игры «Кроты» на пять кнопок и светодиодов.
Урок 8.
Создание мобильной платформы. Написание программы для ее движения.
Урок 9.
Управление движением мобильной платформы вперед и назад в реальном времени с помощью клавиатуры.
Урок 10.
Урок 11.
Переход с языка Skretch на язык C++.
Урок 12.
Реализация различных видов движения мобильной платформы на языке С++
Учебные курсы специализированы и разработаны специально для возрастных групп, которым преподаются.
Для группы RoboKid все занятия содержат краткий курс теории, все остальное внимание уделяется практическому выполнению поставленных задач. Все работы выполняются в групповой форме.В концу занятия каждый учащийся получает фундаментальные навыки в программировании и создании простейших систем управления автоматикой.
Ученики группы BotBase получают более широкие теоретические знания. Занятия разделены на две дисциплины, которые проводятся в разное время: программирование и схемотехника, электроника, механика. По окончании курса учащиеся смогут создавать своих простейших роботов и системы автоматизации.
Будем рады Вас видеть